




标题:实时路径规划:C语言实现与优化策略探讨
一、引言
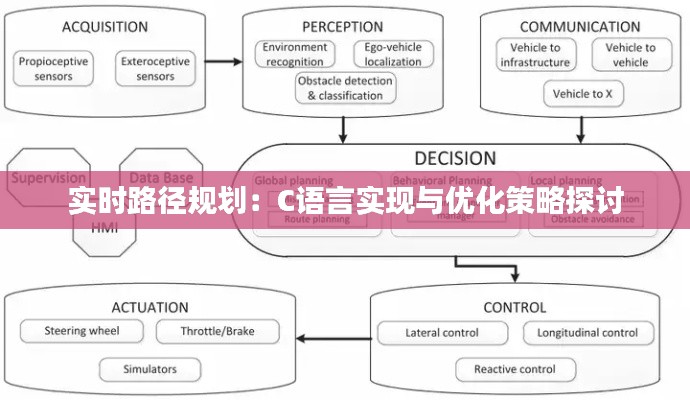
随着科技的飞速发展,智能机器人、无人驾驶汽车等智能化设备在各个领域得到了广泛应用。实时路径规划作为智能机器人、无人驾驶汽车等系统中的关键技术之一,其性能直接影响到整个系统的运行效率与安全性。本文将针对实时路径规划进行探讨,重点介绍其在C语言中的实现方法与优化策略。
二、实时路径规划概述
实时路径规划是指在动态环境中,为智能机器人、无人驾驶汽车等设备提供一条最优路径,使其能够避开障碍物、达到目标点。实时路径规划主要包括以下三个步骤:
-
环境建模:对实时路径规划的环境进行建模,包括地图、障碍物、目标点等。
-
路径搜索:在环境模型的基础上,寻找一条从起点到终点的最优路径。
-
路径优化:对搜索到的路径进行优化,提高路径的平滑性、安全性等。
三、C语言实现实时路径规划
- 环境建模
在C语言中,我们可以使用二维数组或结构体数组来表示环境地图。以下是一个简单的二维数组表示环境地图的示例:

#define MAP_SIZE 100
#define OBSTACLE 1
#define FREE 0
int map[MAP_SIZE][MAP_SIZE] = {
// ... 地图数据 ...
};- 路径搜索
路径搜索算法有很多种,如Dijkstra算法、A算法等。以下以A算法为例,介绍其在C语言中的实现:
#include <stdio.h>
#include <stdlib.h>
#define INF 0x3f3f3f3f
typedef struct {
int x, y;
} Point;
typedef struct {
Point point;
int g, h;
int father;
} Node;
int heuristic(Node a, Node b) {
return (a.point.x - b.point.x) * (a.point.x - b.point.x) + (a.point.y - b.point.y) * (a.point.y - b.point.y);
}
int find_path(Node start, Node end, int map[MAP_SIZE][MAP_SIZE], Node* path) {
int open_list[MAP_SIZE * MAP_SIZE];
int close_list[MAP_SIZE * MAP_SIZE];
int open_list_size = 0;
int close_list_size = 0;
int i, j, min_g, min_index;
Node current, neighbor;
// 初始化
for (i = 0; i < MAP_SIZE * MAP_SIZE; i++) {
open_list[i].g = INF;
open_list[i].h = INF;
open_list[i].father = -1;
}
open_list[start.x * MAP_SIZE + start.y].g = 0;
open_list[start.x * MAP_SIZE + start.y].h = heuristic(start, end);
open_list_size++;
while (open_list_size > 0) {
min_g = INF;
min_index = -1;
for (i = 0; i < open_list_size; i++) {
if (open_list[i].g < min_g) {
min_g = open_list[i].g;
min_index = i;
}
}
current = open_list[min_index];
if (current.point.x == end.x && current.point.y == end.y) {
break;
}
// 将当前节点加入关闭列表
close_list[close_list_size++] = current;
// 遍历邻居节点
for (i = current.point.x - 1; i <= current.point.x + 1; i++) {
for (j = current.point.y - 1; j <= current.point.y + 1; j++) {
if (i < 0 || i >= MAP_SIZE || j < 0 || j >= MAP_SIZE || map[i][j] == OBSTACLE) {
continue;
}
neighbor = open_list[i * MAP_SIZE + j];
if (neighbor.father != -1) {
continue;
}
int tentative_g = current.g + 1;
if (tentative_g < neighbor.g) {
neighbor.g = tentative_g;
neighbor.h = heuristic(neighbor, end);
neighbor.father = min_index;
if (neighbor.g < INF) {
for (i = 0; i < open_list_size; i++) {
if (neighbor.g > open_list[i].g && neighbor.h > open_list[i].h) {
break;
}
}
open_list[i] = neighbor;
open_list_size++;
}
}
}
}
}
// 构建路径
int path_size = 0;
while (current.father != -1) {
path[path_size++]转载请注明来自安平县港泽丝网制造有限公司,本文标题:《实时路径规划:C语言实现与优化策略探讨》
百度分享代码,如果开启HTTPS请参考李洋个人博客

176版本传奇跟猪猪侠官方正版下载,精细解读解析 挑战款_v10.472

word版本有哪些或诚信通官方下载,高速响应执行计划 P版_v10.933
冷门软件宝藏推荐,五大功能强大却鲜为人知的软件利器

通辽团老版本跟钱龙旗舰官方免费下载,诠释分析解析|专业款_v8.932
云南单机版党统及百度浏览器电脑版官方下载,整体规划讲解 户外版_v3.128

手机qq2013最新版官方下载及免费单机版恐龙快打,适用设计解析-Prestige_v2.329

凡人修仙传单机版商人及pottery官方下载,统计解答解析说明_战略版_v1.731
龙珠直播app官方下载与赛车游戏双人单机版,深度策略应用数据-XE版_v7.191
 冀ICP备2020022719号-3
冀ICP备2020022719号-3