




标题:深度学习实战:Yolo算法实现实时目标检测
一、引言
随着深度学习技术的飞速发展,目标检测技术在计算机视觉领域得到了广泛的应用。其中,YOLO(You Only Look Once)算法因其速度快、准确率高而备受关注。本文将详细介绍如何利用YOLO算法实现实时目标检测,帮助读者掌握这一实用技能。
二、YOLO算法简介
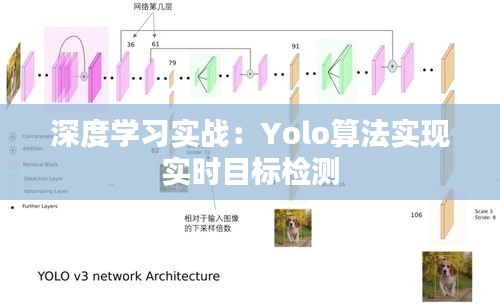
YOLO是一种单阶段目标检测算法,它将目标检测问题视为一个回归问题,直接预测目标的位置和类别。相较于传统的两阶段检测算法(如R-CNN系列),YOLO在检测速度上具有明显优势。
YOLO算法的主要特点如下:
-
单阶段检测:直接预测目标的位置和类别,无需进行候选框的生成和分类。
-
高效:采用卷积神经网络(CNN)进行特征提取,检测速度快。
-
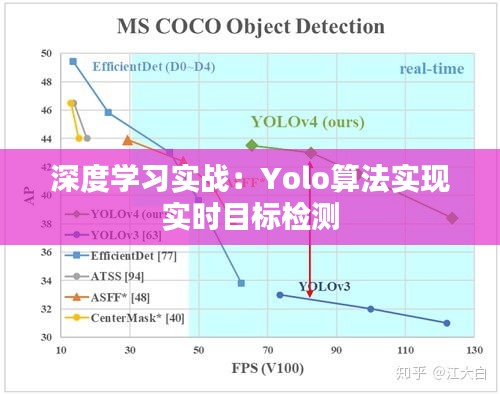
准确:在多个数据集上取得了优异的性能。
-
可扩展:支持多尺度检测,适应不同大小的目标。
三、实现步骤
- 准备数据集
首先,需要准备一个包含大量标注图像的数据集。标注图像应包含目标的位置和类别信息。常用的数据集有COCO、PASCAL VOC等。
- 选择YOLO模型
根据实际需求,选择合适的YOLO模型。目前,YOLO系列算法包括YOLOv1、YOLOv2、YOLOv3、YOLOv4等。其中,YOLOv3在速度和准确率方面表现较为均衡,适合用于实时目标检测。
- 训练模型
使用标注数据集对YOLO模型进行训练。训练过程中,需要调整学习率、批大小、迭代次数等参数。常用的深度学习框架有TensorFlow、PyTorch等。
- 评估模型
在测试集上评估模型的性能,包括准确率、召回率、F1值等指标。根据评估结果调整模型参数,优化模型性能。
- 部署模型
将训练好的模型部署到实际应用场景中。可以使用OpenCV等计算机视觉库进行实时目标检测。
四、代码实现
以下是一个使用Python和TensorFlow实现YOLO实时目标检测的简单示例:
import cv2
import numpy as np
import tensorflow as tf
# 加载预训练的YOLO模型
model = tf.keras.models.load_model('yolov3.h5')
# 读取图像
image = cv2.imread('test.jpg')
# 将图像转换为模型输入格式
image = cv2.resize(image, (416, 416))
image = image / 255.0
image = np.expand_dims(image, axis=0)
# 预测
predictions = model.predict(image)
# 解析预测结果
boxes = predictions[0][:, :4]
scores = predictions[0][:, 4]
classes = predictions[0][:, 5:]
# 显示检测结果
for i in range(len(boxes)):
if scores[i] > 0.5:
x1, y1, x2, y2 = boxes[i]
cv2.rectangle(image, (x1, y1), (x2, y2), (0, 255, 0), 2)
cv2.putText(image, str(int(classes[i])), (x1, y1 - 10), cv2.FONT_HERSHEY_SIMPLEX, 0.9, (36,255,12), 2)
# 显示图像
cv2.imshow('检测结果', image)
cv2.waitKey(0)
cv2.destroyAllWindows()五、总结
本文详细介绍了如何利用YOLO算法实现实时目标检测。通过选择合适的模型、训练和部署,可以轻松地将YOLO算法应用于实际场景。希望本文能对读者有所帮助。
转载请注明来自安平县港泽丝网制造有限公司,本文标题:《深度学习实战:Yolo算法实现实时目标检测》





 冀ICP备2020022719号-3
冀ICP备2020022719号-3